This page showcases the robot arm I am currently working on for my internship. A significant part of this project involves 3D printing, from prototyping to producing final parts. The experience is helping me deepen my skills in both robotics and additive manufacturing.
I really enjoy making the parts and working on the 3D modeling aspects of this project.
Note: This project is ongoing and still in progress.
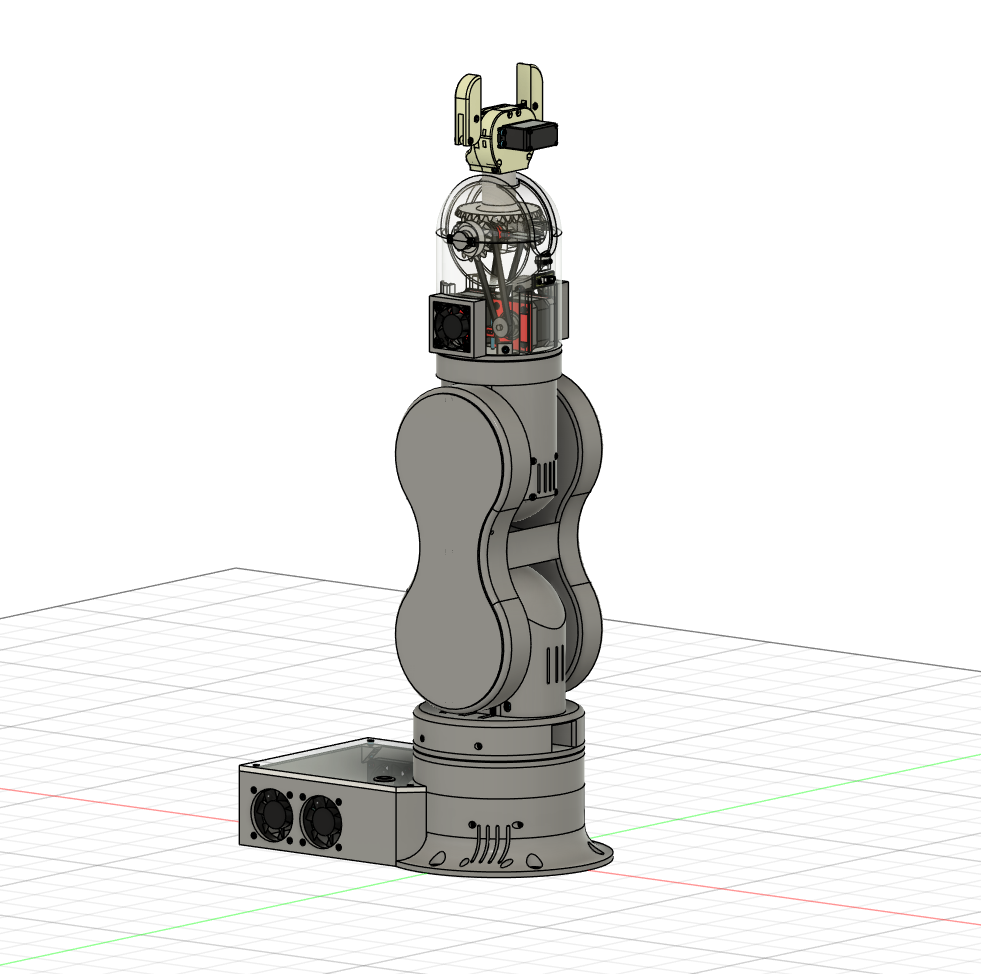
During my internship at RP2, I have been working on the development and prototyping of a 6-DOF (Degrees of Freedom) robot arm. This project has given me the opportunity to combine my interests in robotics, 3D printing, and mechanical design.
The robot arm is designed for advanced manipulation tasks and features 6 degrees of freedom, allowing for a wide range of movement and flexibility. The arm uses a total of 7 stepper motors of 3 different types, each selected for their specific torque and speed requirements at different joints. The entire model was designed in Autodesk Fusion 360, enabling precise control over the mechanical and assembly aspects.
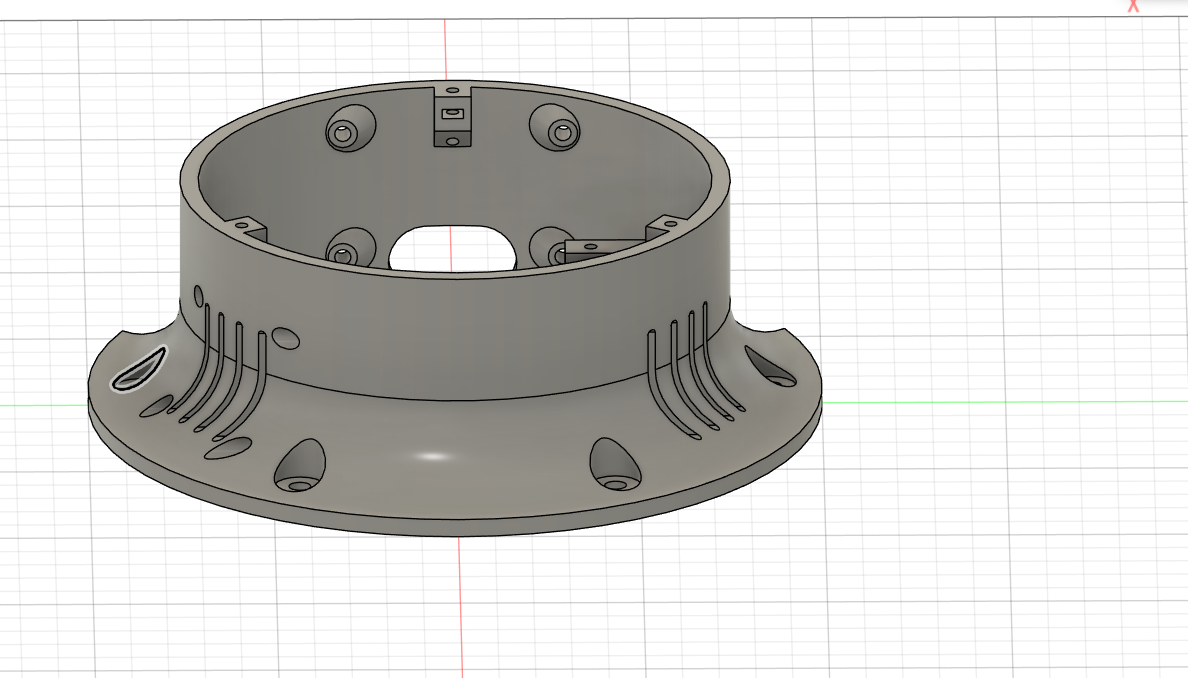
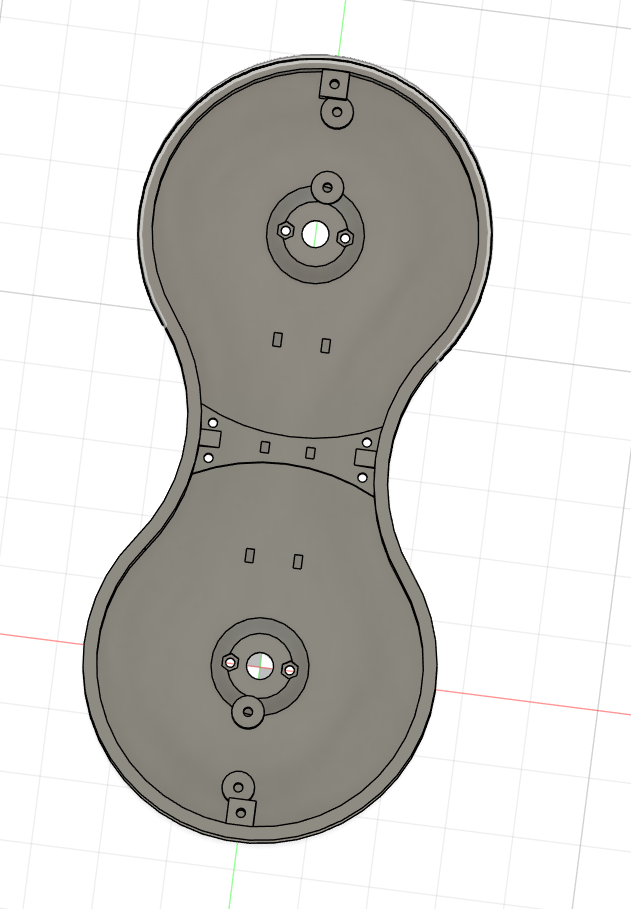
A significant part of my work has been focused on 3D printing the robot arm components. The materials used include:
This combination of materials allows for both robust structural parts and fine, detailed elements where needed.
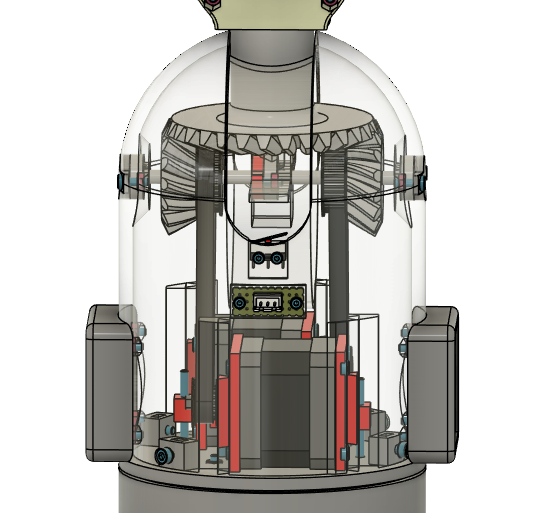
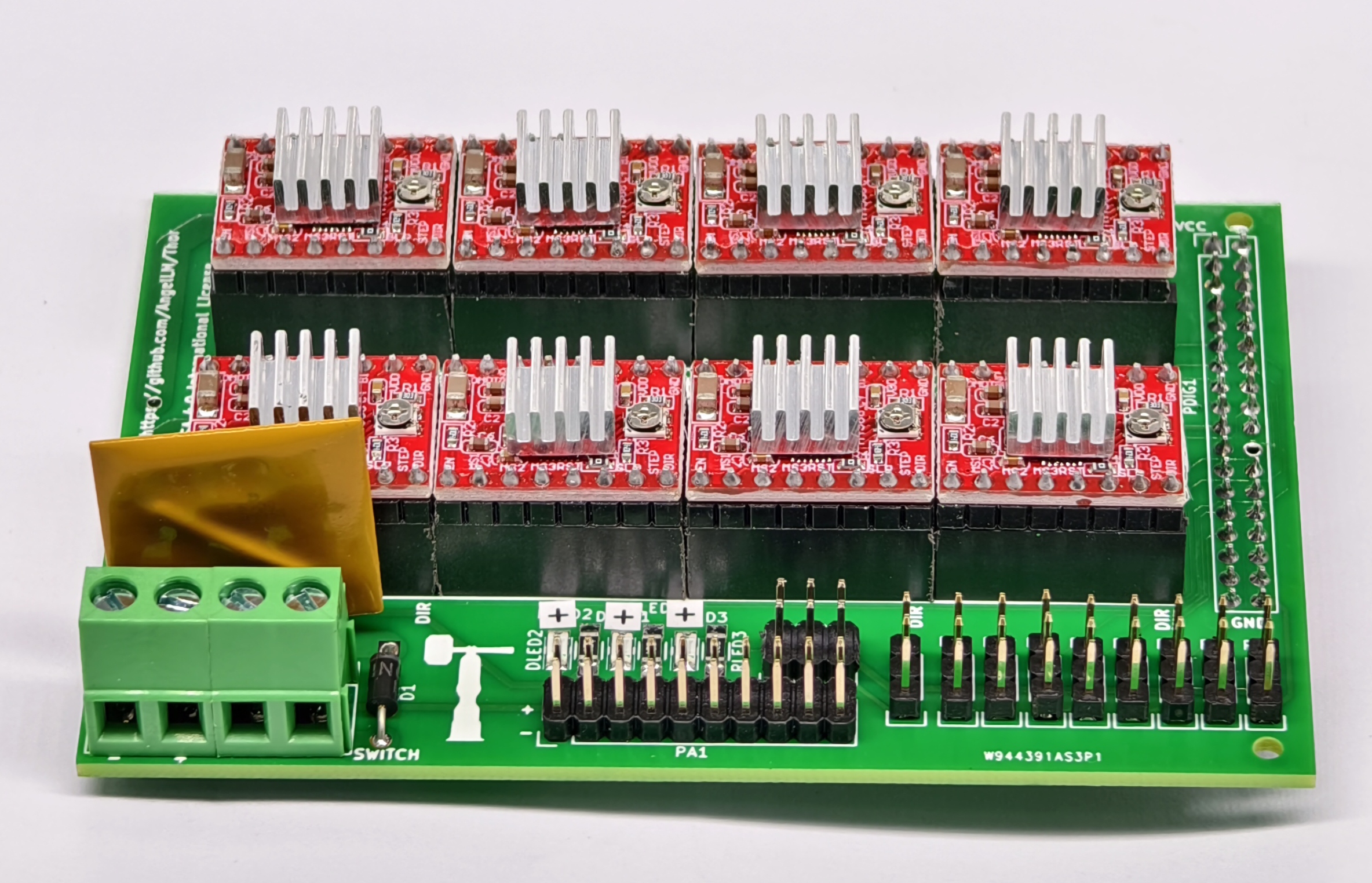
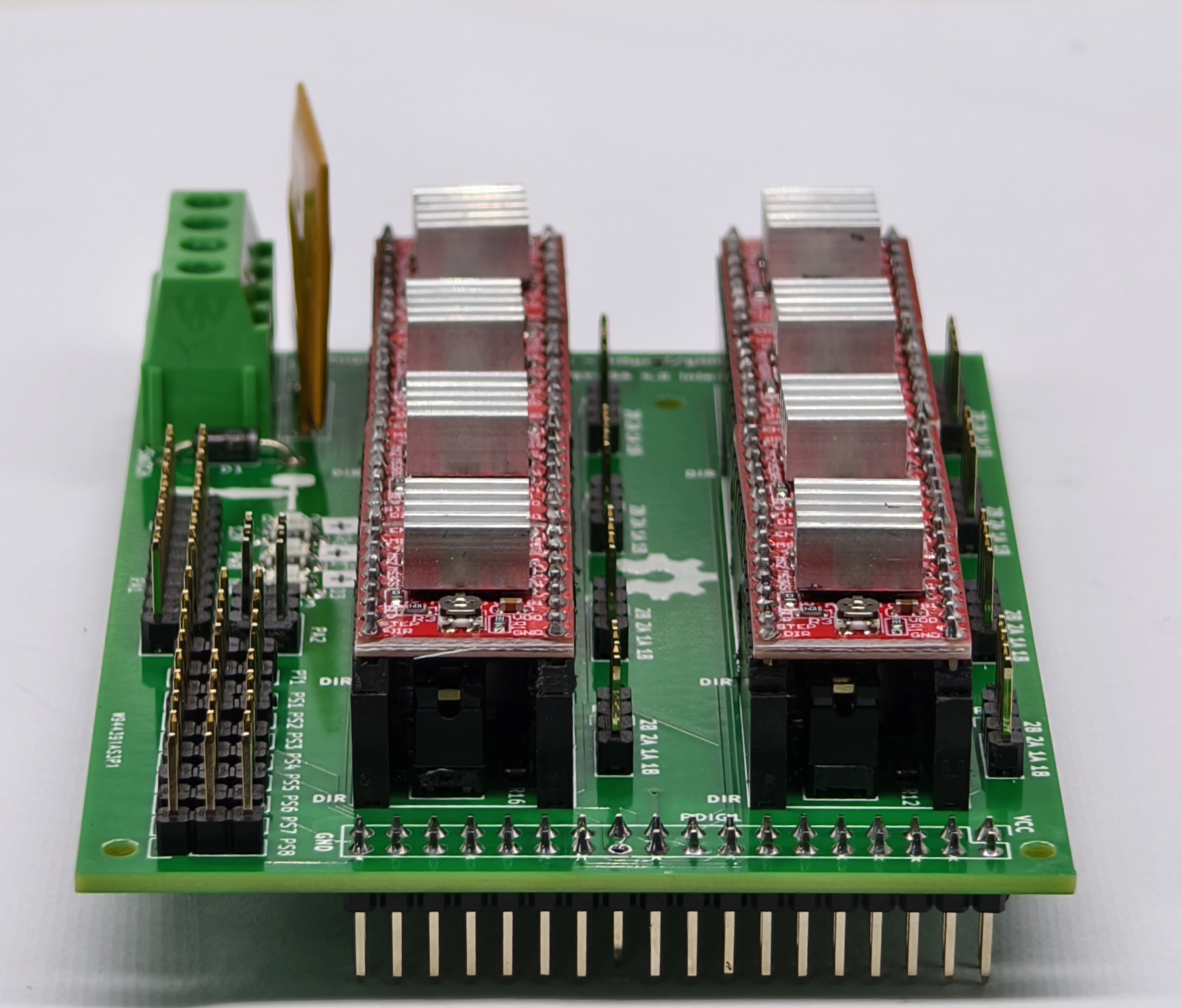
To drive the stepper motors, I designed and assembled custom electronics. The control board features multiple stepper drivers and is tailored for the unique requirements of the robot arm. Below are images of the custom electronics:
This internship project has allowed me to deepen my skills in 3D modeling, additive manufacturing, and electronics integration. I look forward to further developing the robot arm and exploring its applications in automation and research.